y 1
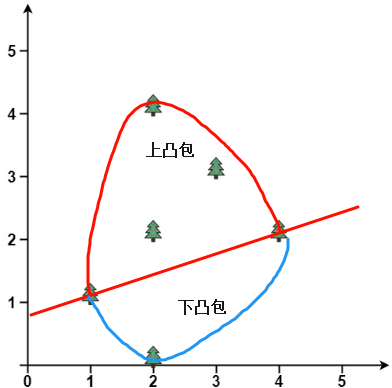
遍历点数组,带入方程,y值大于直线时,加入上凸包,小于直线时,加入下凸包,详细见代码:
def hull(points: list[list] = [], p1: list = [], p2: list = [], isUp: bool = True) -> list[list]:
'''获取上(下)凸包中的点'''
hull_points = []
for p in points:
x0, y0 = p[0], p[1]
x1, y1, x2, y2 = p1[0], p1[1], p2[0], p2[1]
if x1 == x2:
continue
y = (y1-y2)/(x1-x2)*(x0-x1)+y1
if isUp and y0 >= y:
hull_points.append(p)
if not isUp and y0 <= y:
hull_points.append(p)
return hull_points
这里简要说明一下传入参数,points为当前处理的点数组,p1、p2为当前的两个端点,isUp表示是处理上凸包还是下凸包,最后放回需要的上(下)凸包
以上凸包为例,在获取当前上凸包的所有点数组后,需要获取点pm,使得pm到p1p2的距离最大
将直线方程写成Ax+By+C=0的形式
点到线距离公式:
遍历当前点数组,当d最大时,返回点pm
def distance(hull_points: list[list] = [], p1: list = [], p2: list = []) -> list:
'''计算最远点pm ,返回该点'''
d = 0
pm = None
for p in hull_points:
if p == p1 or p == p2: continue
A = p1[1] - p2[1]
B = p2[0] - p1[0]
C = p1[0] * p2[1] - p2[0] * p1[1]
temp = abs(A*p[0]+B*p[1]+C) / math.sqrt(pow(A, 2) + pow(B, 2))
if temp > d:
pm = p
d = temp
return pm
参数hull_points为当前上(下)凸包中包含的点,p1、p2为当前的两个端点。
到这里并未获得最外层的点,因此需要重复2~3步骤,其中的p1、p2应该变为相应的端点,即每一次的切割凸包都会生成两个子问题,这两个子问题的端点为(p1,pm)和(pm,p2),典型的分治。
力扣提交完整代码:
def hull(points: list[list] = [], p1: list = [], p2: list = [], isUp: bool = True) -> list[list]:
'''获取上(下)凸包中的点'''
hull_points = []
for p in points:
x0, y0 = p[0], p[1]
x1, y1, x2, y2 = p1[0], p1[1], p2[0], p2[1]
if x1 == x2: continue
y = (y1-y2)/(x1-x2)*(x0-x1)+y1
if isUp and y0 >= y:
hull_points.append(p)
if not isUp and y0 <= y:
hull_points.append(p)
return hull_points
def distance(hull_points: list[list] = [], p1: list = [], p2: list = []) -> list:
'''计算最远点pm ,返回该点'''
d = 0
pm = None
for p in hull_points:
if p == p1 or p == p2: continue
A = p1[1] - p2[1]
B = p2[0] - p1[0]
C = p1[0] * p2[1] - p2[0] * p1[1]
temp = abs(A*p[0]+B*p[1]+C) / math.sqrt(pow(A, 2) + pow(B, 2))
if temp > d:
pm = p
d = temp
return pm
def convex_hull(ans: list[list] = [], points: list[list] = [], p1: list = [], p2: list = [], isUp: bool = True) -> list[list]:
'''凸包'''
hull_points = hull(points, p1, p2, isUp)
pm = distance(hull_points, p1, p2)
if pm is not None:
convex_hull(ans, hull_points, p1, pm, isUp)
convex_hull(ans, hull_points, pm, p2, isUp)
else:
for p in points:
# 如果 p 在 p1p2 直线上
if (p2[0]-p1[0])*(p[1]-p1[1]) == (p[0]-p1[0])*(p2[1]-p1[1]):
if p not in ans:
ans.append(p)
class Solution:
def outerTrees(self, trees: List[List[int]]) -> List[List[int]]:
trees.sort()
ans = []
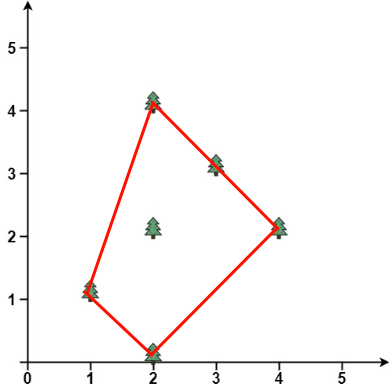
p1, p2 = trees[0], trees[-1]
# 上凸包
convex_hull(ans, trees, p1, p2, True)
# 下凸包
convex_hull(ans, trees, p1, p2, False)
return ans
出现的问题与思考
在获取上(下)凸包中的点的函数hull中有这样一句 if x1 == x2: continue
这里为什么要这么写?不用处理这种情况吗?
因为当两个端点的横坐标相等的时候,斜率公式会报错。(一开始没有注意
这是由于算法一开始取的就是最值端点,若存在若干点在这条直线上,那么会在convex_hull函数中加入最终答案中,因此不需要担心值会缺失。
那么在递归过程中遇到这种情况是否会丢失答案吗?
蒟蒻通过判断pm是否取值为递归判断条件,当递归至pm值不存在时,则表示当前端点上(下)凸包没有值了,那么将这条直线中的所有点(包括端点)加入答案,显而易见,不会导致值缺失。